-

-

-

-

-

-
2022
-

-

-

-

-

-

-

-

-
2021
-

-

-

-
2020
-

-
2019
-

-

-
2018
-

-
2017
-

-

-

-

-
2016
-
-

-

-
2015
-
2014
-
-

-

-
2013
-

-

-

-

-

-

-

-

-
2012
-

-
2011
-
2010
-
1998























Anfangsstabilität unter beliebigen Winkeln
Bei Katamaranen weiß man spätestens seit Shuttleworth, dass neben der Längs- und der Querstabilität auch die Diagonalstabilität entscheidend für die Kentersicherheit eines Katamarans ist. Dieser Fall tritt dann auf, wenn man einen Kurs etwa mit Halbwind fährt. Dabei sind die Querkräfte relativ groß, so dass es passieren kann, dass der Rumpf mit dem Leebug in einer Welle steckenbleibt und dann quasi über die Diagonale kentert.
Die ganze Untersuchung ist nur dann wirklich aussagekräftig, wenn man die Stabilität bei großen Winkeln für alle Werte zwischen vorlich und querab bestimmt.
Als Vorabtest habe ich das nur einmal mit der Anfangsstabilität durchgerechnet, um zu zeigen, dass das Friendship-Framework auch mit solchen Spezialwünschen umgehen kann. Die Ergebnisse sind schlüssig, so dass ich sie hier nicht vorenthalten möchte.
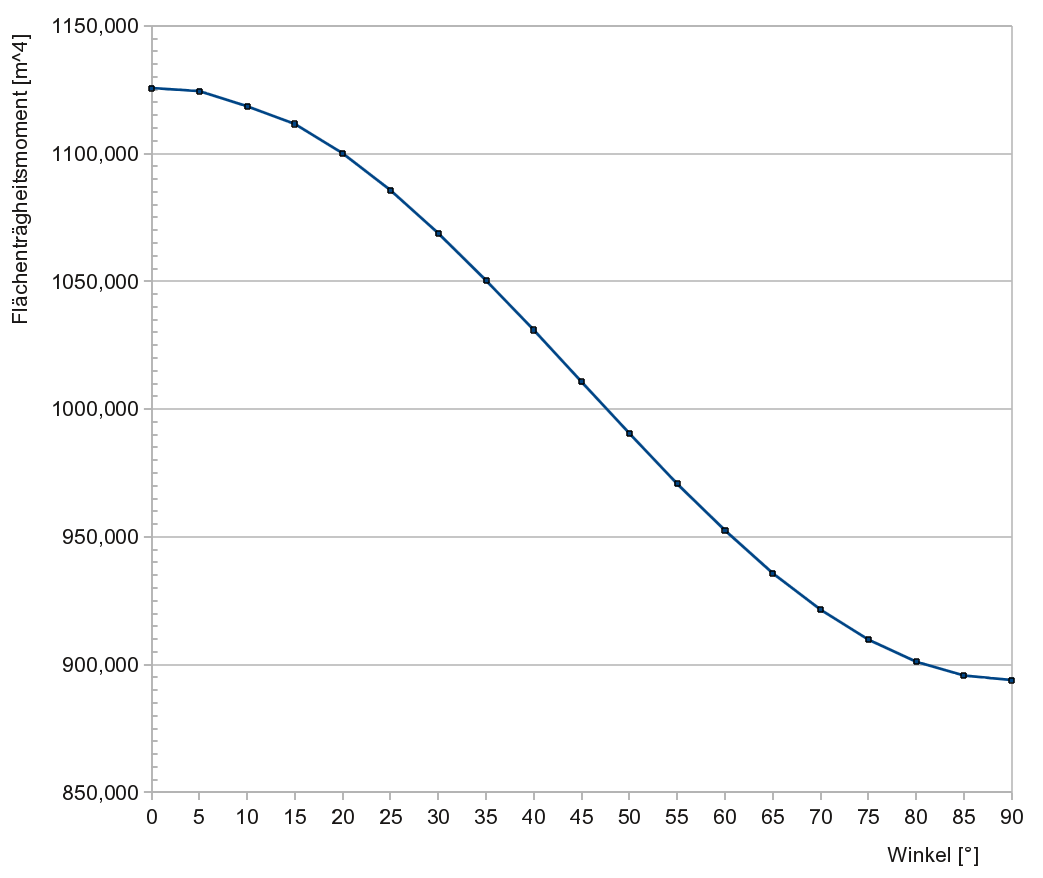
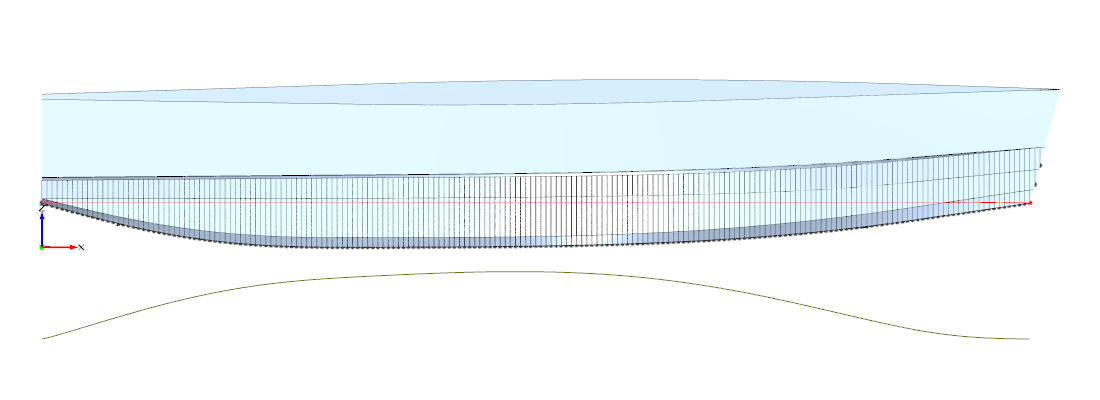
Abbildung 1: Anfangsstabilitätskurve von 0° (voraus) bis 90° (querab)
Die Berechnung beruht darauf, dass das Schiffsmodell von -45° bis 45° gedreht wird und dabei jeweils die Längs- und die Queranfangsstsbilität in Form von Flächenträgheiten bestimmt werden (die metazentischen Höhen (KML, KMB) könnte man genauso nehmen). Der Bereich wurde deshalb gewählt, weil die Anfangsstabilitäten auf den Sektionen beruhen. Diese stehen aber immer im rechten Winkel zur x-Achse. Auf Grund der Drehung fällt diese nicht mit der Schiffslängsrichtung zusammen. Bei Winkeln >45° würden die Sektionen zu sehr entarten und zu Rechenfehlern führen. Der interessante Punkt dabei ist, dass Längs- und Querstabilität bei 45° tatsächlich knickfrei zusammenpassen müssen. Dies ist hier der Fall (vgl. Abbildung 1). Somit ist davon auszugehen, dass die Berechnungen stimmig sind.
Die entsprechende Friendship-Datei findet sich hier. Für alle Bitzmerker: Ja, die Datei enthält auch das gesamte Modell des Katamarans.
Viel Spaß damit.