23.12.2018
Rückblick 2018 und Ausblick 2019
Das Jahr 2018 war leider von langsamen Fortschritt gekennzeichnet, weil mir leider noch ein anderes Projekt dazwischen gekommen ist.

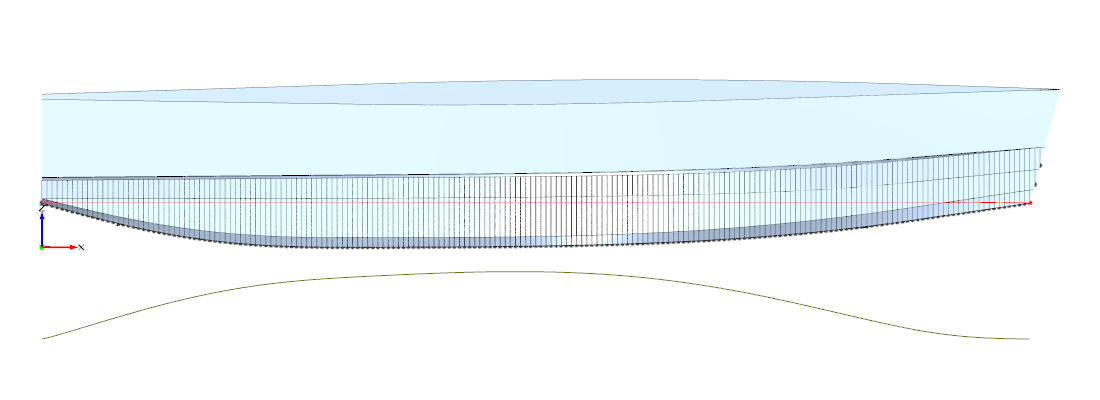
Abbildung 1:
SMM Hamburg
Dieses Jahr fand in Hamburg wieder die SMM statt. Das war wie immer eine Reise wert. Enttäuschend ist, dass es die kleine Kläranlage von Hamann nicht mehr gibt, weil sie die neuesten IMO-Anforderungen nicht mehr erfüllen kann. Dies hat für mein Projekt die direkte Folge, dass ich größere Abwassertanks vorsehen muss. Da man Grauwasser fast überall über Bord gehen lassen darf (man es aber in der netten Badebucht nicht unbedingt tun möchte (ich finde diese Kleckergeräusche vor Anker nicht wirklich angenehm)), Schwarzwasser aber nicht, sind getrennte Tanks sinnvoll. Auf der anderen Seite hat sich bei den elektrischen Antrieben viel getan: Man kann stand heute tatsächlich komplett fertige Antriebe im Bereich 50kW kaufen, die von einer Hochvolt-Gleichstrom-Schiene aka Batterie gespeist werden. Das sah vor zwei Jahren noch ganz anders aus und erleichtert mir mein Projekt sehr.
Außerdem musste ich noch meine Webseite auf PHP 7.X umstellen, weil für PHP 5.6 der Support abläuft, so dass es keine Sicherheitsupdates mehr gibt. Die Provider reagieren darauf, indem sie PHP 5.6 einfach abschalten, was effektiv zum Abschalten meiner Webseite geführt hätte . Zum Glück gibt es mit 'mysqli' einen einfachen Migrationspfad für prozedurale PHP-Skripte, die MySQL benutzen, da die Alternative PDO erheblich mehr Eingriffe verlangt hätte.
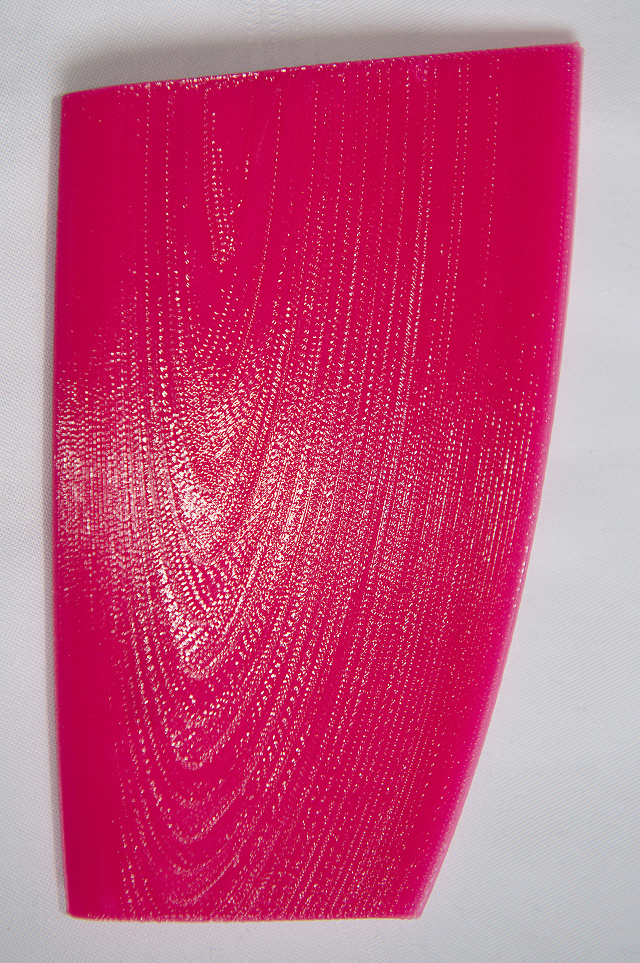
Abbildung 2:
Ruder aus dem 3D Drucker
Mein vorrangiges Ziel für 2019 ist es, endlich mein Modell im Maßstab 1:10 zu bauen. Das CAD-Modell in CAESES ist schon fast fertig, aber dann kommt die Nachbearbeitung mit Rhino3D. Das Ganze soll im wesentlichen die Toolchain abbilden, die ich dann auch für das reale Schiff verwenden möchte, damit das im Original keine Uraufführung wird. Im Wesentlichen geht es dabei um den Export und die Neu-/Nachbearbeitung des Moidells in Rhino3D und das Erstellen von CNC-Datensätzen. Für das Modell gehen diese Daten an eine Portalfräse, später in Realiter an einen Lasercutter oder Wasserstrahlschneider. Wesentlich für mich ist dabei, dass ich meine Rhino3D-Fähigkeiten ausbaue.
Bei dem Modell selbst steht im Vordergrund, dass es ein Funktionsmodell zum Entwickeln und Testen der vorgesehen Vektorsteuerung für die Antriebsmaschinen werden soll. Dabei steht das Schiff- und Antriebsmodell, dass ich schon berechnet habe und das Regelmodell mit Störgrößenkompensation im Vordergrund. Als Erweiterung wäre es auch möglich, die Vektorsteuerung mit einer Übergeordneten Positionsregelung zu versehen. Damit könnte man beispielsweise eine Funktion zum Halten der aktuellen Position programmieren, was beim Einhandsegeln ganz nützlich sein kann. In diesem Zusammenhang werde ich mir auch noch ein paar Gedanken zum Autopilot und zur Wegpunktnavigation machen. Dann kann ich mir das Gelump aus sparen, das im Yachtbereich angeboten wird. Die Vektorsteuerung erfolgt wie im Original mit meiner Bachmann SPS. Das Modell wird dann wie ein Schiff im Modellbau ferngesteuert, allerdings mit meiner HBC Radiomatic Fernsteuerung. Das Ganze soll also ein echter Hardware-in-the-Loop-Test werden.

-
2022
-
2021
-
2020
-
2019
-
2018
-
2017
-
2016
-
2015
-
2014
-
2013
-
2012
-
2011
-
2010
-
1998